1. Техникалық сипаттамаларыeVTOL қозғалтқышы
In таратылған электрлікҚозғалтқыш, қозғалтқыштар ұшаққа тарту күшін қамтамасыз ететін қозғау жүйесін қалыптастыру үшін қанаттарда немесе фюзеляжда бірнеше пропеллерді немесе желдеткіштерді басқарады. Қозғалтқыштың қуат тығыздығы ұшақтың пайдалы жүк көтергіштігіне тікелей әсер етеді. Қозғалтқыштың қуат шығару қуаты, сенімділігі және қоршаған ортаға бейімделуі электрлік ұшақтың динамикалық сипаттамалары мен қауіпсіздігін анықтайтын маңызды факторлар болып табылады. Электр көліктерін, дрондарды және eVTOL қозғалтқыштарын таңдау әртүрлі шығындарға, қолдану сценарийлеріне және басқа да себептерге байланысты әртүрлі [1].

(Сурет көзі: Network/Safran ресми сайты)
1) Электр көліктері: тұрақты магнит көбірексинхронды қозғалтқыштар,Жоғары тиімділік пен жоғары айналу моменті бар тұрақты магнитті қозғалтқыштар жүргізу тәжірибесін жақсарта алады. Сонымен қатар, тұрақты магнитті қозғалтқыштардың жоғары қуат тығыздығы электр көліктеріне бірдей көлемде жоғары қуат алуға көмектеседі.
(2) Ұшқышсыз ұшу аппараттары: жиі қолданылатын щеткасызТұрақты ток қозғалтқышы.Щеткасыз тұрақты ток қозғалтқышының салмағы мен шуы аз, ал техникалық қызмет көрсету құны төмен, бұл ұшқышсыз ұшу аппараттарының ұшу талаптарына сәйкес келеді; Екіншіден, щеткасыз тұрақты ток қозғалтқышының жылдамдығы жоғарырақ, бұл дрондардың жоғары жылдамдықты ұшу қажеттіліктеріне сәйкес келеді. Мысалы, DJI щеткасыз қозғалтқыштарды пайдаланады.
(3) eVTOL: Қозғалтқыштың тиімділігі мен момент тығыздығына қойылатын жоғары талаптар, тұрақты магнитті синхронды қозғалтқыш электр қозғалтқышының қуат жүйесі үшін өте перспективалы шешім болып табылады, себебі осьтік ағынды тұрақты магнитті қозғалтқыш радиалды кеңістікті пайдаланудың жоғары деңгейіне ие, ал қуат тығыздығы мен момент тығыздығы ұзындық диаметрінің қатынасы аз болған жағдайда артықшылықтарға ие. Қазіргі электрлік VTOL ұшақтары, мысалы, Joby S4 және Archer Midnight, тұрақты магнитті синхронды қозғалтқыштарды пайдаланады [1].
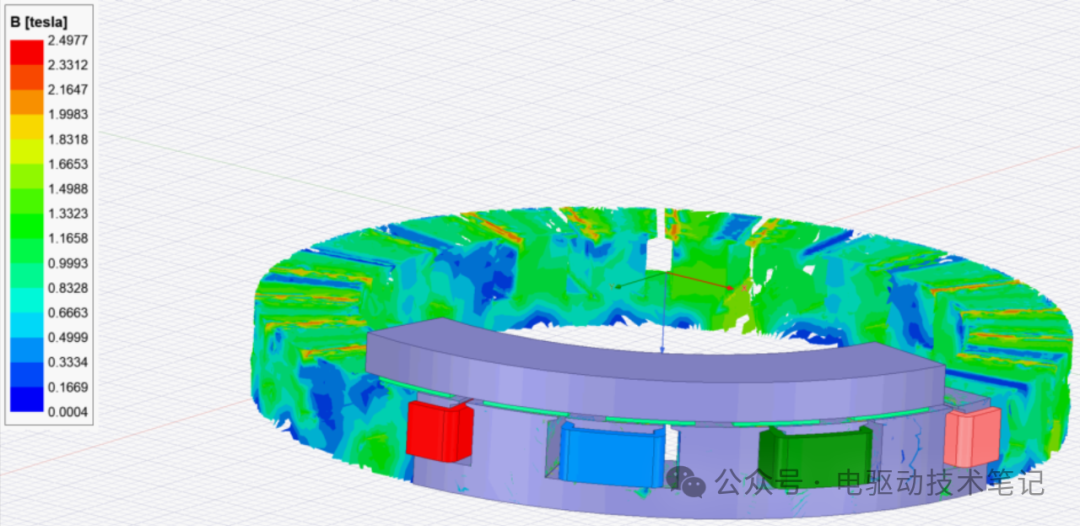
Келесі суретте бір статорлы бір роторлы осьтік ағынды қозғалтқыштың бекітілген роторлы магниттік индукция қарқындылығының бұлтты бейнесі көрсетілген.
Келесі суретте электр ұшақтары мен электр көлігінің қозғалтқыш параметрлерінің салыстырмасы берілген.

2.eVTOL қозғалтқышының даму үрдісі
Қазіргі уақытта eVTOL қуат жүйесінің негізгі даму үрдісі электромагниттік жобалау технологиясын, жылуды басқару технологиясын және жеңіл технологияны жетілдіру арқылы қозғалтқыш құрылымының салмағын және салқындату жүйесінің қосалқы салмағын азайту, сондай-ақ қозғалтқыштың қуат тығыздығын және әртүрлі айнымалы жағдайлардағы қуат шығыс сыйымдылығын үнемі жақсарту болып табылады. «Ұшатын көліктер мен негізгі технологияларды зерттеу және әзірлеу» мәліметтері бойынша, авиациялық қозғалтқыш жоғары температура шектеулері бар оқшаулағыш материалдарды, жоғары магниттік энергия тығыздығы бар тұрақты магнитті материалдарды және жеңіл құрылымдық материалдарды пайдалану арқылы қозғалтқыш корпусының номиналды қуат тығыздығын 5 кВт/кг-нан астамға жеткізе алды. Халбах магниттік массивін, темір өзексіз құрылымды, Литц сым орамасын және басқа технологияларды пайдалану сияқты қозғалтқыштың электромагниттік құрылымының дизайнын жақсарту, сондай-ақ қозғалтқыштың жылу тарату дизайнын жақсарту арқылы қозғалтқыш корпусының номиналды қуат тығыздығы 2030 жылы 10 кВт/кг-ға жетуі мүмкін, ал номиналды қуат тығыздығы 2035 жылы 13 кВт/кг-нан асады деп күтілуде [1].

3. Таза электрлік және гибридті бағыттарды салыстыру
Таза электрлік маршрутпен және гибридті маршрутпен салыстырғанда, тиісті өндірушілердің қазіргі таңдамасы бойынша, отандық eVTOL жобасы негізінен литий-ионды батареялардың энергия тығыздығымен шектелген таза электрлік схемаға негізделген, ал аз жолаушы сыйымдылығы бар eVTOL таза электрлік қозғалтқыш технологиясының ең жақсы қону алаңы болып табылады. Шетелде кейбір өндірушілер гибридті жоспарды алдын ала жасап, бірнеше сынақ және итерация раундтарында көшбасшылықты қолға алды. Келесі кестеден көрініп тұрғандай, гибридті схема төзімділік бұрышында айқын күштірек және болашақта орта-ұзақ қашықтықтағы және төмен биіктіктегі көлік қозғалысы сценарийінде көбірек қолдануға қол жеткізе алады [1].
Жарияланған уақыты: 2025 жылғы 27 ақпан